Βιομηχανικά ρομπότ στη σύγχρονη παραγωγή — τύποι και συσκευές
Τα βιομηχανικά ρομπότ χρησιμοποιούνται ευρέως σήμερα στην ανθρώπινη παραγωγή. Χρησιμεύουν ως ένα από τα πιο αποτελεσματικά μέσα μηχανοποίησης και αυτοματοποίησης των μεταφορών και των εργασιών φορτίου, καθώς και πολλών τεχνολογικών διαδικασιών.
Η θετική επίδραση της εισαγωγής βιομηχανικών ρομπότ συνήθως παρατηρείται ταυτόχρονα από πολλές πλευρές: η παραγωγικότητα της εργασίας αυξάνεται, η ποιότητα του τελικού προϊόντος βελτιώνεται, το κόστος παραγωγής μειώνεται, οι συνθήκες εργασίας για ένα άτομο βελτιώνονται και τέλος, η μετάβαση μιας επιχείρησης από το Η απελευθέρωση ενός τύπου προϊόντος σε άλλο διευκολύνεται σημαντικά.
Ωστόσο, για να επιτευχθεί ένα τόσο εκτεταμένο και πολύπλευρο θετικό αποτέλεσμα της εισαγωγής βιομηχανικών ρομπότ σε μια ήδη λειτουργούσα χειρωνακτική παραγωγή, είναι απαραίτητο να υπολογιστεί εκ των προτέρων το προγραμματισμένο κόστος για την ίδια τη διαδικασία υλοποίησης, για την τιμή του ρομπότ και Επίσης, για να σταθμίσετε εάν η πολυπλοκότητα της παραγωγής και της τεχνολογικής σας διαδικασίας είναι γενικά επαρκής για το σχέδιο εκσυγχρονισμού που θα βοηθήσει στην εγκατάσταση βιομηχανικών ρομπότ.
Στην πραγματικότητα, μερικές φορές αρχικά η παραγωγή είναι τόσο απλοποιημένη που η εγκατάσταση ρομπότ είναι απλώς μη πρακτική και ακόμη και επιβλαβής. Επιπλέον, θα απαιτηθεί εξειδικευμένο προσωπικό για την εγκατάσταση, τη συντήρηση, τον προγραμματισμό ρομπότ και κατά τη διαδικασία εργασίας - βοηθητικές συσκευές κ.λπ. Είναι σημαντικό να το λάβετε υπόψη εκ των προτέρων.
Με τον ένα ή τον άλλο τρόπο, οι ρομποτικές μη επανδρωμένες λύσεις στην παραγωγή γίνονται όλο και πιο επίκαιρες σήμερα, έστω και μόνο επειδή ελαχιστοποιούνται οι επιβλαβείς επιπτώσεις στην ανθρώπινη υγεία. Ας προσθέσουμε εδώ την κατανόηση ότι ο πλήρης κύκλος επεξεργασίας και εγκατάστασης γίνεται πιο γρήγορα, χωρίς διαλείμματα για σπασίματα καπνού και χωρίς σφάλματα εγγενή σε οποιαδήποτε παραγωγή όπου ένας ζωντανός άνθρωπος ενεργεί αντί για ένα ρομπότ. Ο ανθρώπινος παράγοντας, μετά το στήσιμο των ρομπότ και την έναρξη της τεχνολογικής διαδικασίας, πρακτικά αποκλείεται.
Σήμερα, η χειρωνακτική εργασία στις περισσότερες περιπτώσεις αντικαθίσταται από την εργασία ενός ρομποτικού χειριστή: λαβή εργαλείου, στερέωση εργαλείου, συγκράτηση τεμαχίου εργασίας, τροφοδοσία στην περιοχή εργασίας. Οι περιορισμοί επιβάλλονται μόνο από: ικανότητα φόρτωσης, περιορισμένη επιφάνεια εργασίας, προ-προγραμματισμένες μετακινήσεις.
Το βιομηχανικό ρομπότ είναι σε θέση να παρέχει:
-
υψηλή παραγωγικότητα χάρη στη γρήγορη και ακριβή τοποθέτηση. καλύτερη αποτελεσματικότητα, καθώς δεν χρειάζεται να πληρώνονται μισθοί στα άτομα που αντικαθιστά, αρκεί ένας χειριστής.
-
υψηλή ποιότητα — ακρίβεια της τάξης των 0,05 mm, χαμηλή πιθανότητα γάμου.
-
ασφάλεια για την ανθρώπινη υγεία, για παράδειγμα, λόγω του γεγονότος ότι κατά τη ζωγραφική, η ανθρώπινη επαφή με χρώματα και βερνίκια αποκλείεται πλέον.
-
Τέλος, ο χώρος εργασίας του ρομπότ είναι αυστηρά περιορισμένος και απαιτεί ελάχιστη συντήρηση, ακόμη και αν το περιβάλλον εργασίας είναι χημικά επιθετικό, το υλικό του ρομπότ θα αντέξει αυτή την πρόσκρουση.

Ιστορικά, το πρώτο κατοχυρωμένο με δίπλωμα ευρεσιτεχνίας βιομηχανικό ρομπότ κυκλοφόρησε το 1961 από την Unimation Inc για το εργοστάσιο της General Motors στο New Jersey. Η ακολουθία των ενεργειών του ρομπότ καταγράφεται με τη μορφή κώδικα σε ένα μαγνητικό τύμπανο και εκτελείται σε γενικευμένες συντεταγμένες. Για να εκτελέσει ενέργειες, το ρομπότ χρησιμοποιεί υδραυλικούς ενισχυτές. Αυτή η τεχνολογία μεταφέρθηκε αργότερα στην ιαπωνική Kawasaki Heavy Industries και στους Άγγλους Guest, Keen και Nettlefolds.Έτσι, η παραγωγή ρομπότ από την Unimation Inc επεκτάθηκε κάπως.
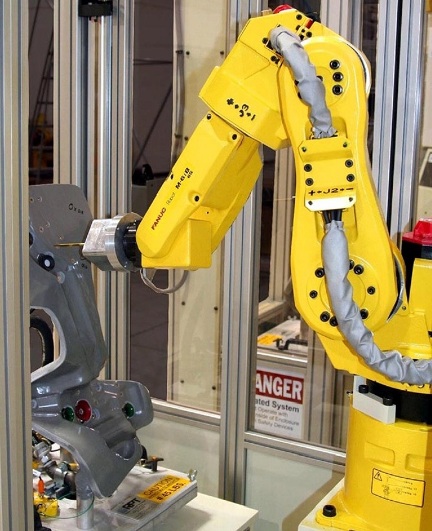
Μέχρι το 1970, το Πανεπιστήμιο του Στάνφορντ είχε αναπτύξει το πρώτο ρομπότ που έμοιαζε με τις δυνατότητες ενός ανθρώπινου βραχίονα με 6 βαθμούς ελευθερίας, το οποίο ελεγχόταν από έναν υπολογιστή και είχε ηλεκτρικούς κινητήρες. Παράλληλα, η ιαπωνική εταιρεία Nachi το εξελίσσει. Η γερμανική KUKA Robotics θα παρουσίαζε το ρομπότ έξι αξόνων Famulus το 1973 και η ελβετική ABB Robotics θα άρχιζε τώρα να πουλά το ρομπότ ASEA, επίσης έξι αξόνων και ηλεκτρομηχανικά κινούμενο.
Το 1974, η ιαπωνική εταιρεία Fanuc δημιούργησε τη δική της παραγωγή. Το 1977, κατασκευάστηκε το πρώτο ρομπότ Yaskawa.Με την ανάπτυξη της τεχνολογίας των υπολογιστών, τα ρομπότ εισάγονται όλο και περισσότερο στην αυτοκινητοβιομηχανία: στις αρχές της δεκαετίας του 1980, η General Motors επένδυσε σαράντα δισεκατομμύρια δολάρια στη δημιουργία του δικού της συστήματος αυτοματισμού εργοστασίων.
Το 1984, η εγχώρια Avtovaz θα αποκτήσει άδεια από την KUKA Robotics και θα αρχίσει να παράγει ρομπότ για τις δικές της γραμμές παραγωγής. Σχεδόν το 70% όλων των ρομπότ στον κόσμο, μέχρι το 1995, θα βρίσκονται στην Ιαπωνία, την εγχώρια αγορά της. Με αυτόν τον τρόπο, τα βιομηχανικά ρομπότ θα καθιερωθούν επιτέλους στην αυτοκινητοβιομηχανία.

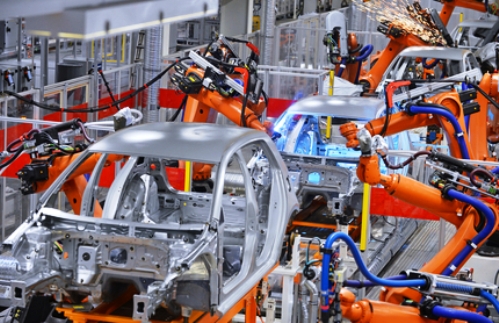
Πώς πάει η αυτοκινητοβιομηχανία χωρίς συγκόλληση; Με τιποτα. Αποδεικνύεται λοιπόν ότι όλες οι αυτοκινητοβιομηχανίες στον κόσμο είναι εξοπλισμένες με εκατοντάδες ρομποτικά συγκροτήματα συγκόλλησης. Κάθε πέμπτο βιομηχανικό ρομπότ ασχολείται με τη συγκόλληση. Η επόμενη ζήτηση είναι ένας ρομποτικός φορτωτής, αλλά η συγκόλληση με τόξο αργού και σημειακή έρχονται πρώτα.
Καμία χειροκίνητη συγκόλληση δεν μπορεί να ταιριάζει με την ποιότητα της ραφής και τον βαθμό ελέγχου της διαδικασίας με ένα εξειδικευμένο ρομπότ. Τι γίνεται με τη συγκόλληση με λέιζερ, όπου από απόσταση έως και 2 μέτρων μέσω ενός εστιασμένου λέιζερ, η τεχνολογική διαδικασία πραγματοποιείται με ακρίβεια 0,2 mm — είναι απλά αναντικατάστατη στην κατασκευή αεροσκαφών και στην ιατρική. Προσθέστε σε αυτό την ενσωμάτωση με ψηφιακά συστήματα CAD / CAM.
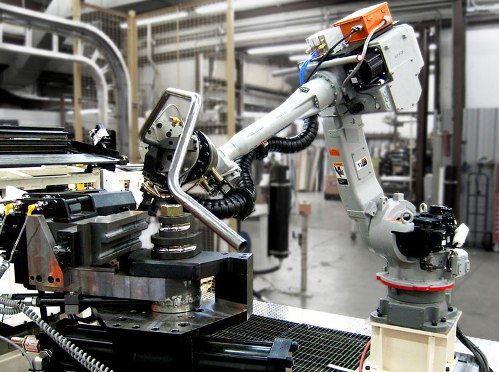
Το ρομπότ συγκόλλησης έχει τρεις κύριες μονάδες λειτουργίας: ένα σώμα εργασίας, έναν υπολογιστή που ελέγχει το σώμα εργασίας και τη μνήμη. Το σώμα εργασίας είναι εξοπλισμένο με χειρολαβή. Το σώμα έχει ελευθερία κινήσεων κατά μήκος τριών αξόνων (Χ, Υ, Ζ) και η ίδια η λαβή μπορεί να περιστρέφεται γύρω από αυτούς τους άξονες. Το ίδιο το ρομπότ μπορεί να κινηθεί κατά μήκος των οδηγών.

Καμία σύγχρονη μονάδα παραγωγής δεν μπορεί να κάνει χωρίς εκφόρτωση και φόρτωση, ανεξάρτητα από το μέγεθος και το βάρος των προϊόντων. Το ρομπότ θα εγκαταστήσει ανεξάρτητα το τεμάχιο εργασίας στο μηχάνημα, στη συνέχεια θα ξεφορτώσει και θα το τοποθετήσει. Ένα ρομπότ μπορεί να αλληλεπιδράσει με πολλές μηχανές ταυτόχρονα. Φυσικά, δεν μπορούμε να μην αναφέρουμε σε αυτό το πλαίσιο τη φόρτωση των αποσκευών στο αεροδρόμιο.
Τα ρομπότ ήδη καθιστούν δυνατή τη μείωση του κόστους προσωπικού στο ελάχιστο. Δεν πρόκειται μόνο για απλές λειτουργίες όπως η διάτρηση ή η λειτουργία του φούρνου. Τα ρομπότ είναι ικανά να σηκώνουν περισσότερα βάρη κάτω από πολύ πιο δύσκολες συνθήκες, ενώ δεν κουράζονται και ξοδεύουν πολύ λιγότερο χρόνο από ό,τι ένας ζωντανός άνθρωπος.
Στα χυτήρια και τα σιδηρουργεία, για παράδειγμα, οι συνθήκες είναι παραδοσιακά πολύ δύσκολες για τους ανθρώπους. Αυτός ο τύπος παραγωγής βρίσκεται στην τρίτη θέση μετά την εκφόρτωση και τη φόρτωση όσον αφορά τη ρομποτοποίηση. Δεν είναι τυχαίο ότι σχεδόν όλα τα ευρωπαϊκά χυτήρια είναι εξοπλισμένα με αυτοματοποιημένα συστήματα με βιομηχανικά ρομπότ. Το κόστος υλοποίησης ενός ρομπότ κοστίζει στην επιχείρηση εκατοντάδες χιλιάδες δολάρια, αλλά εμφανίζεται στη διάθεσή της ένα πολύ ευέλικτο σύμπλεγμα, το οποίο υπεραντιστάθμιση.

Ρομποτικό λέιζερ και κοπή πλάσματος βελτιώστε τις παραδοσιακές γραμμές με φακούς πλάσματος. Τρισδιάστατη κοπή και κοπή γωνιών και δοκών Ι, προετοιμασία για περαιτέρω επεξεργασία, συγκόλληση, διάτρηση. Στην αυτοκινητοβιομηχανία, αυτή η τεχνολογία είναι απλά αναντικατάστατη, αφού οι άκρες των προϊόντων πρέπει να κοπούν με ακρίβεια και ταχύτητα μετά τη σφράγιση και τη διαμόρφωση.
Ένα τέτοιο ρομπότ μπορεί να συνδυάσει τόσο τη συγκόλληση όσο και την κοπή.Η παραγωγικότητα αυξάνεται με την εισαγωγή της κοπής με υδροβολή, η οποία εξαλείφει την περιττή έκθεση στη θερμότητα του υλικού.Έτσι, σε δυόμισι λεπτά κόβονται όλες οι μικρές τρύπες στο μέταλλο των κουπέ Renault Espace στο ρομποτικό εργοστάσιο της Renault στη Γαλλία.
Στην κατασκευή επίπλων, αυτοκινήτων και άλλων προϊόντων, η ρομποτική κάμψη σωλήνων που περιλαμβάνει μια κεφαλή εργασίας είναι χρήσιμη όταν ο σωλήνας τοποθετείται από ένα ρομπότ και λυγίζει πολύ γρήγορα. Ένας τέτοιος σωλήνας μπορεί τώρα να εξοπλιστεί με διάφορα στοιχεία που δεν θα παρεμποδίσουν τη διαδικασία κάμψης των μαντρέλιων από το ρομπότ.
Τρύπημα, διάτρηση και φρεζάρισμα - τι θα μπορούσε να είναι ευκολότερο για ένα ρομπότ, είτε είναι μέταλλο, είτε ξύλο είτε πλαστικό. Οι ακριβείς και ανθεκτικοί χειριστές χειρίζονται αυτές τις εργασίες με μεγάλη ταχύτητα. Η περιοχή εργασίας δεν είναι περιορισμένη, αρκεί να εγκαταστήσετε έναν εκτεταμένο άξονα ή πολλούς ελεγχόμενους άξονες, οι οποίοι θα δώσουν εξαιρετική ευελιξία συν υψηλή ταχύτητα. Δεν μπορεί κανείς να το κάνει αυτό.
Οι συχνότητες περιστροφής του εργαλείου φρεζαρίσματος φτάνουν τις δεκάδες χιλιάδες στροφές ανά λεπτό και η λείανση των ραφών μετατρέπεται πλήρως σε μια σειρά απλών επαναλαμβανόμενων κινήσεων. Αλλά στο παρελθόν, η λείανση και η λειαντική επεξεργασία επιφάνειας θεωρούνταν κάτι βρώμικο και βαρύ, και επίσης πολύ επιβλαβές. Η πάστα τροφοδοτείται τώρα αυτόματα κατά την επεξεργασία του τροχού από τσόχα μετά τη διέλευση του λειαντικού ιμάντα. Γρήγορο και ασφαλές για τον χειριστή.
Οι προοπτικές για τη βιομηχανική ρομποτική είναι τεράστιες, καθώς τα ρομπότ μπορούν ουσιαστικά να εισαχθούν σε σχεδόν κάθε παραγωγική διαδικασία και σε απεριόριστες ποσότητες.Η ποιότητα της αυτόματης εργασίας είναι μερικές φορές τόσο υψηλή που είναι απλά ανέφικτη για τα ανθρώπινα χέρια. Υπάρχουν ολόκληρες μεγάλες βιομηχανίες όπου τα λάθη και οι ανακρίβειες είναι απαράδεκτες: κατασκευή αεροσκαφών, ιατρικός εξοπλισμός ακριβείας, όπλα εξαιρετικής ακρίβειας κ.λπ. Για να μην αναφέρουμε την αύξηση της ανταγωνιστικότητας των μεμονωμένων επιχειρήσεων και τη θετική επίδραση στην οικονομία τους.