Βασικές παράμετροι και χαρακτηριστικά ηλεκτρομαγνητικών ηλεκτρονόμων
 Μια ηλεκτρική συσκευή που εφαρμόζει τον νόμο ελέγχου του ρελέ ονομάζεται ρελέ... Σε ένα ρελέ, όταν η παράμετρος ελέγχου (εισόδου) αλλάζει ομαλά σε μια ορισμένη τιμή ρύθμισης, η ελεγχόμενη παράμετρος (έξοδος) αλλάζει απότομα. Επίσης, τουλάχιστον μία από αυτές τις παραμέτρους πρέπει να είναι ηλεκτρική.
Μια ηλεκτρική συσκευή που εφαρμόζει τον νόμο ελέγχου του ρελέ ονομάζεται ρελέ... Σε ένα ρελέ, όταν η παράμετρος ελέγχου (εισόδου) αλλάζει ομαλά σε μια ορισμένη τιμή ρύθμισης, η ελεγχόμενη παράμετρος (έξοδος) αλλάζει απότομα. Επίσης, τουλάχιστον μία από αυτές τις παραμέτρους πρέπει να είναι ηλεκτρική.
Δράση λειτουργικών οργάνων ηλεκτρομαγνητικό ρελέ μπορεί να εντοπιστεί σύμφωνα με το διάγραμμα στο σχ. 1. Το σώμα λήψης Α μετατρέπει την τιμή εισόδου (τάση) Uin που παρέχεται στο πηνίο 2 του μαγνητικού κυκλώματος 1 σε μια ενδιάμεση τιμή, δηλ. στη μηχανική δύναμη της άγκυρας 3. Η μηχανική δύναμη της άγκυρας FЯ δρα στο σύστημα επαφής του εκτελεστικού σώματος Β. Η ενδιάμεση τιμή — η δύναμη της άγκυρας FЯ, είναι ανάλογη με την τιμή εισόδου Uin, συγκρίνεται με ένα δεδομένη τιμή της δύναμης Fpr που αναπτύχθηκε από το ελατήριο 9 του ενδιάμεσου σώματος Β. Όταν Uin <Uav, Fya
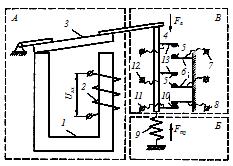 Ρύζι. 1 Σχέδιο του ηλεκτρομαγνητικού ηλεκτρονόμου
Ρύζι. 1 Σχέδιο του ηλεκτρομαγνητικού ηλεκτρονόμου
Κατά τη διαδικασία λειτουργίας, το ηλεκτρομαγνητικό ρελέ σε μια χρονική κλίμακα διακρίνει τέσσερις φάσεις: την περίοδο (χρόνος) ενεργοποίησης tav, την περίοδο εργασίας, την περίοδο (χρόνος) διακοπής λειτουργίας, την περίοδο (χρόνος) ανάπαυσης tp (Εικ. . 2).
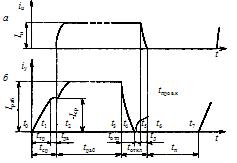
Ρύζι. 2. Εξάρτηση των ποσοτήτων της παραγωγής (α) και της παραγωγής (β) από την ώρα
Περίοδος ενεργοποίησης ηλεκτρομαγνητικού ρελέ
 Η περίοδος απόκρισης περιλαμβάνει το χρονικό διάστημα από τη στιγμή που το σήμα εισόδου αρχίζει να επηρεάζει το σώμα παρακολούθησης μέχρι να εμφανιστεί το σήμα στο ελεγχόμενο κύκλωμα. Το τμήμα του άξονα της τετμημένης tav = t2 –t0 αντιστοιχεί σε αυτήν την περίοδο στο σχ. 2, β. Τη στιγμή t0 το ρεύμα στο πηνίο του ρελέ αυξάνεται σε μια τιμή στην οποία η ηλεκτρομαγνητική δύναμη Fe που ενεργεί στον οπλισμό αρχίζει να αντιτίθεται στη δύναμη του ελατηρίου Fm (μηχανική δύναμη) του ενδιάμεσου σώματος. Η τιμή εισόδου ονομάζεται τότε τιμή αποδοχής.
Η περίοδος απόκρισης περιλαμβάνει το χρονικό διάστημα από τη στιγμή που το σήμα εισόδου αρχίζει να επηρεάζει το σώμα παρακολούθησης μέχρι να εμφανιστεί το σήμα στο ελεγχόμενο κύκλωμα. Το τμήμα του άξονα της τετμημένης tav = t2 –t0 αντιστοιχεί σε αυτήν την περίοδο στο σχ. 2, β. Τη στιγμή t0 το ρεύμα στο πηνίο του ρελέ αυξάνεται σε μια τιμή στην οποία η ηλεκτρομαγνητική δύναμη Fe που ενεργεί στον οπλισμό αρχίζει να αντιτίθεται στη δύναμη του ελατηρίου Fm (μηχανική δύναμη) του ενδιάμεσου σώματος. Η τιμή εισόδου ονομάζεται τότε τιμή αποδοχής.
Η αρχική περίοδος αντιστοιχεί στο τμήμα ttr = t1 — t0. Τη χρονική στιγμή t1, ο οπλισμός του ηλεκτρομαγνήτη ρελέ αρχίζει να κινείται. Κατά τη διάρκεια tdv = t2 — t1, η άγκυρα κινείται, ξεπερνώντας την αντίσταση του ενδιάμεσου σώματος Β (βλ. Εικ. 1) και ενεργοποιώντας το εκτελεστικό σώμα Γ.
Στο τέλος της διαδρομής του οπλισμού, οι επαφές του κινητήρα κλείνουν, το ρεύμα φορτίου στο (Εικ. 2, α) αρχίζει να αυξάνεται από το μηδέν σε μια τιμή ισορροπίας. Η τιμή εισόδου στην οποία ξεκινά ο έλεγχος του κυκλώματος εξόδου ονομάζεται τιμή αποδοχής (Iav). Η ισχύς Psr που αντιστοιχεί στο Isr ονομάζεται ισχύς ενεργοποίησης.
Χρόνος απόκρισης t cf = ttr + tdv.
Ο χρόνος απόκρισης των ηλεκτρομαγνητικών ηλεκτρονόμων κυμαίνεται από 1-2 έως 20 ms. Τα ηλεκτρομαγνητικά ρελέ χρόνου παρέχουν καθυστέρηση έως και 10 δευτερόλεπτα.
Για την εκτίμηση του χρόνου απόκρισης του ρελέ, επιτρέπεται η χρήση της έκφρασης
t cf = t1kz-bm –a,
όπου t1 είναι ο χρόνος απόκρισης για ένα δεδομένο συντελεστή ασφάλειας ks και συντελεστής m = 1. a, b — συντελεστές που καθορίζονται ανάλογα με τον τύπο του ρελέ και τις τιμές των kz και m.
Για ηλεκτρονόμους υψηλής ταχύτητας σε kz = 1,5¸2, η τιμή του συντελεστή a προσεγγίζει τη μονάδα. Για συνηθισμένους ηλεκτρονόμους με kz = 1,5¸3, η τιμή a = 0,25¸0,95, η τιμή του συντελεστή b είναι συνήθως στην περιοχή 1,4-1,6.
Περίοδος λειτουργίας του ηλεκτρομαγνητικού ηλεκτρονόμου
 Η περίοδος εργασίας περιλαμβάνει το χρονικό διάστημα twork = t3 — t2, δηλ. ο χρόνος από τη στιγμή ελέγχου του κυκλώματος εξόδου t2 έως τη στιγμή τερματισμού της κρούσης στο ευαίσθητο όργανο του σήματος εισόδου t3. Το ρεύμα αρχίζει να αυξάνεται σε μια σταθερή τιμή του Iwork (Εικ. 2, β) — αυτή είναι η τιμή εργασίας της τιμής εισόδου, η οποία εξασφαλίζει αξιόπιστη λειτουργία του ρελέ.
Η περίοδος εργασίας περιλαμβάνει το χρονικό διάστημα twork = t3 — t2, δηλ. ο χρόνος από τη στιγμή ελέγχου του κυκλώματος εξόδου t2 έως τη στιγμή τερματισμού της κρούσης στο ευαίσθητο όργανο του σήματος εισόδου t3. Το ρεύμα αρχίζει να αυξάνεται σε μια σταθερή τιμή του Iwork (Εικ. 2, β) — αυτή είναι η τιμή εργασίας της τιμής εισόδου, η οποία εξασφαλίζει αξιόπιστη λειτουργία του ρελέ.
Η αναλογία Iwork / Icr = kz ονομάζεται συντελεστής ασφάλειας στην εργασία.
Για τον χαρακτηρισμό της χωρητικότητας υπερφόρτωσης του ευαίσθητου στοιχείου του ρελέ, χρησιμοποιείται η τιμή της ποσότητας εισόδου, η οποία ονομάζεται οριακή τιμή της ποσότητας λειτουργίας Ioperating.max.
Περιορισμός της τιμής εργασίας — αυτή είναι η αξία του που μπορεί να αντέξει το ευαίσθητο όργανο για μια σύντομη κανονικοποιημένη χρονική περίοδο. Ωστόσο, η τιμή αυτής της τιμής είναι απαράδεκτη όταν το ρελέ λειτουργεί σε κανονική λειτουργία λόγω της κατάστασης ηλεκτρικής ή μηχανικής αντοχής ή θέρμανσης.
Η έννοια ισχύος ελέγχου Ru χρησιμοποιείται για τον χαρακτηρισμό της ικανότητας μεταφοράς φορτίου του ηλεκτροκινητήρα. Η ισχύς ελέγχου είναι η ισχύς στο ελεγχόμενο κύκλωμα που μπορεί να μεταδώσει η μονάδα δίσκου για μεγάλο χρονικό διάστημα.
Περίοδος διακοπής ηλεκτρομαγνητικού ρελέ
 Η περίοδος απενεργοποίησης περιέχει το χρονικό διάστημα toff = t6 — t3, δηλ. ο χρόνος από τη στιγμή της παύσης της κρούσης στο όργανο αντίληψης t3 έως τη στιγμή που το ρεύμα στο ελεγχόμενο κύκλωμα μειώνεται στο μηδέν (Εικ. 16, α).
Η περίοδος απενεργοποίησης περιέχει το χρονικό διάστημα toff = t6 — t3, δηλ. ο χρόνος από τη στιγμή της παύσης της κρούσης στο όργανο αντίληψης t3 έως τη στιγμή που το ρεύμα στο ελεγχόμενο κύκλωμα μειώνεται στο μηδέν (Εικ. 16, α).
Η περίοδος απενεργοποίησης περιλαμβάνει την περίοδο απελευθέρωσης totp = t4 — t3 στην οποία το ρελέ είναι απενεργοποιημένο. Το ρεύμα iy στο πηνίο του ρελέ πέφτει στο μηδέν (Εικ. 2, β). Κατά τη διάρκεια αυτής της περιόδου, η αντίθετη δύναμη του ελατηρίου (μηχανική δύναμη) υπερβαίνει την ηλεκτρομαγνητική δύναμη, δηλ. Fm> Fe και ο οπλισμός απελευθερώνεται.
Μετά την επιλογή αστοχίας επαφής (διάστημα tc = t5 — t4), οι επαφές του ρελέ ανοίγουν και ανάβει ένα τόξο μεταξύ τους, το οποίο σβήνει μετά από χρόνο td = t6 — t5. Κατά την περίοδο td, το ρεύμα στο ελεγχόμενο κύκλωμα μειώνεται από In στο μηδέν (Εικ. 2, α).
Χρόνος εκτός λειτουργίας t t = tp + tc + td.
Η περίοδος ενεργοποίησης χαρακτηρίζεται από έναν παράγοντα ανάκτησης, ο οποίος είναι ο λόγος του ρεύματος πτώσης Iotp προς το ρεύμα παραλαβής Iav: kv = Iotp / Icr.
Συνήθως, για ρελέ προστασίας συστήματος ισχύος και ρελέ ελέγχου που ελέγχουν την παράμετρο εισόδου εντός στενών ορίων, το kv πρέπει να είναι πιο κοντά στη μονάδα.
Περίοδος ανάπαυσης του ηλεκτρομαγνητικού ρελέ
Η περίοδος ανάπαυσης είναι το χρονικό διάστημα tp = t7 — t6.
Η περίοδος καθυστέρησης χαρακτηρίζεται από μια παράμετρο που ονομάζεται τιμή εκτός λειτουργίας, η οποία είναι η μεγαλύτερη τιμή της ποσότητας εισόδου που διασφαλίζει ότι το ρελέ δεν λειτουργεί ή διατηρείται. Ο χρόνος διακοπής λειτουργίας είναι μικρότερος από τον χρόνο έναρξης λειτουργίας και τον χρόνο απελευθέρωσης.
Ο λόγος της ισχύος ελέγχου προς την ισχύ ενεργοποίησης ονομάζεται κέρδος, ku = Py / Pcr.
Ο αριθμός των εκκινήσεων ανά μονάδα χρόνου καθορίζεται από μια τιμή που είναι αντιστρόφως ανάλογη του χρόνου κύκλου:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota O.B.